




一、汽车总成的基本含义
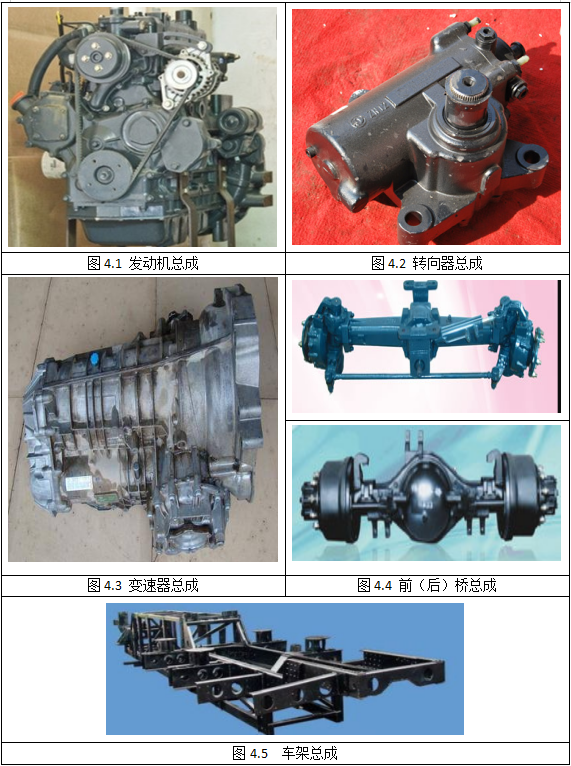
汽车总成是汽车行业里比较通俗说法,没有严格学术上定义。通常是指一是发动机总成、 二是方向机总成 、三是变速器总成,四是前后桥、五是车架等。《报废汽车回收管理办法》第15条的表述是:“禁止任何单位或者个人利用报废汽车‘五大总成’(发动机、方向机、变速器、前后桥、车架)以及其他零配件拼装汽车;禁止报废汽车整车、五大总成‘和拼装车进入市场交易或者以其他任何方式交易;禁止拼装车和报废汽车上路行驶。”行业一般认为,五大总成里面只要有两个达到报废损坏程度,这辆汽车就没有什么修复价值了。
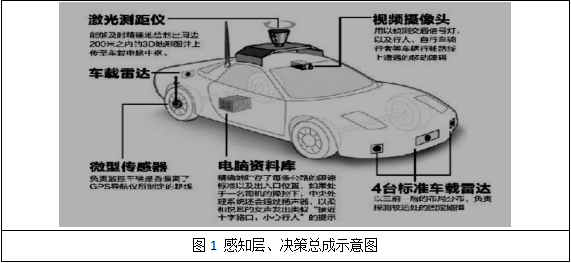
目前自动驾驶基本上还是后装,或者是样品试制过程,如果发展到线控总成,有关自动驾有关器件安排,基本要安排在总装车间了。
二、线控的概念
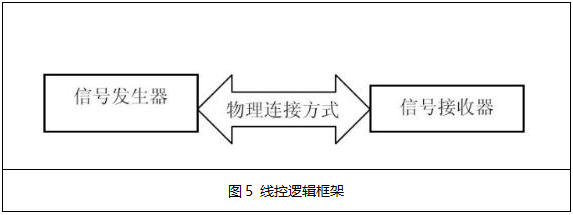
是机电行业特定短语。指机电控制里边的一种物理控制方式,主要是指信号发生器与信号接收器之间的连接方式是通过线缆或其他动作传到物体进行连接的。如部分汽车油路通断及流量的控制等。
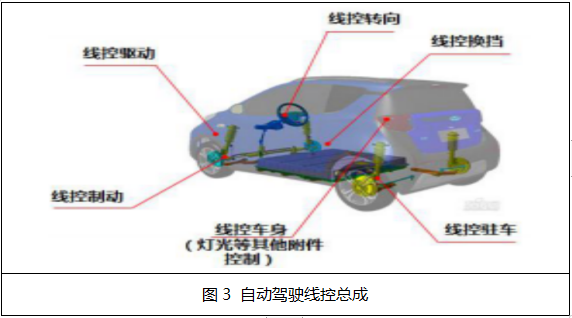
目前的线控技术包括:线控转向系统、线控换挡系统、线控制动系统、线控悬架系统、线控增压系统、线控油门系统。自动驾驶车辆越来越多的要应用线控技术推广应用。线控制动系统在工业车辆上已经应用较多,线控技术将会越来越多地应用于普通车辆,已经是基本趋势。
离开线控技术应用推广,自动驾驶车辆永远是一种高大上的概念而已。换一句话,自动驾驶技术的执行部件,必须要求“线控”模式。
三、主要线控总成件技术分析
1.线控转向控制系统
线控转向模块由转向模块和转向器模块两部分组成,见图6。
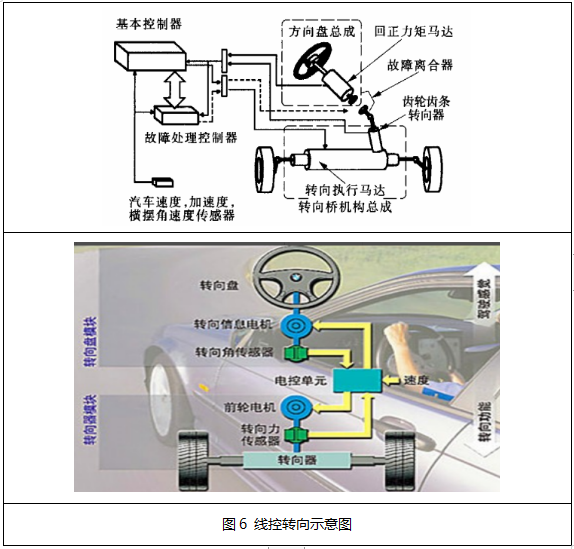
(a)方向盘总成组成,包括方向盘、方向盘转角传感器、力矩传感器、方向盘回正力矩电机。
(b)方向盘总成的主要功能,是将驾驶员的转向意图(通过测量方向盘转角)转换成数字信号,并传递给主控制器;同时接受主控制器送来的力矩信号,产生方向盘回正力矩,以提供给驾驶员相应的路感信息。
(c)转向执行总成,包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等组成。
(d)转向执行总成的功能,是接受主控制器的命令,通过转向电机控制器控制转向车轮转动,实现驾驶员的转向意图。
(注意:方向盘转角传感器、前轮转角传感器的位置,及信号传统方向。)
(e)主控制器对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力电机和转向电机发送指令,控制两个电机的工作,保证各种工况下都具有理想的车辆响应。
(f)自动防故障系统(图6没有标注)是线控转向系的重要模块,它包括一系列的监控和实施算法,针对不同的故障形式和故障等级做出相应的处理,以求最大限度地保持汽车的正常行驶。
2)线控转向技术分析
(a)电控单元,有2个正向输入,即车速和方向盘转角电信号;有2个正向输出,即转向信息电机和前轮电机;一个转向里力反馈信号。可以看出这个线控转向系统是一个有负反馈的稳定平衡系统。
(b)方向盘转角传感器(信号发生器)与前轮转角传感器(信号接收器)是通过物理(有线缆、电控单元)
连接的,是典型线控技术的应用。
(c)线控转向总成为上层控制(人工驾驶、自动驾驶)的决策,提供执行支持。
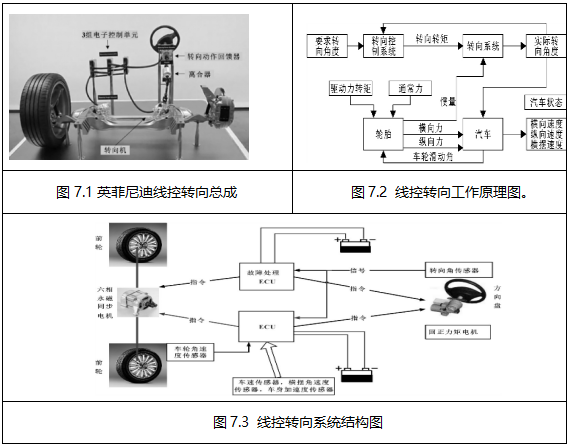
3)线控转向总成实例
图7.1是英菲尼迪线控转向总成实例,图7.2是线控转向工作原理图,图7.3 线控转向系统结构图。
线控制动(Brake-by-wire)的概念源于飞机制造行业,一般可分为两类:电控液压制动系统(Electro-Hydraulic Brake,即EHB);电控机械制动系(Electro-Mechanical Brake,即EMB)。下面研究EMB。
1)线控制动模块
EMB工作原理见图8,中央控制器负责控制4个轮子电机控制器配,由电机带动制动执行机构。
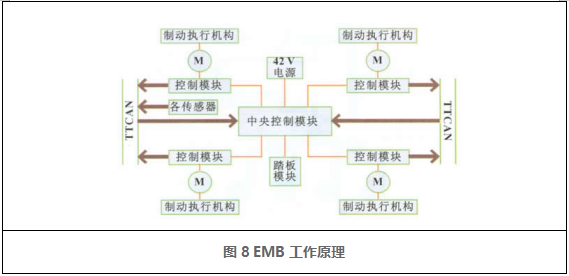
(i) 中央控制模块(ECU)。接收来自各种传感器的信号,为执行机构的控制模块提供控制信号(如制动执行机构需产生的力矩);
(ii) 各种传感器。提供及时、准确的信号给ECU,比如轮速传感器、踏板位移传感器;
(iii)EMB有4套制动执行机构。每一套执行机构都包括力矩电机、制动器外壳、制动垫块及动力控制模块;
(iv)高能量的电源。当今汽车上的12 V电源只能提供3 kW左右的能量,而EMB工作时的峰值功率为2kW,再加上其他汽车附件(比如汽车空调等)工作时的峰值功率,总功率大概在12.3 kW左右,要配备42V电源系统。
3)EMB是线制动系统的一种,其优点
整个系统结构简单,体积小,反应灵敏,减小制动距离,工作稳定,没有连接制动管路,没有液压油管路,不存在液压油泄露问题,维护简单,通过ECU直接控制,信号通过电传播,易于实现ABS、TCS、ESP、ACC等功能。
4))EMB线制动系统实例

(a)线控油门,即车辆速度靠电子油门控制。通过位置传感器,传送油门踩踏深浅与快慢的信号,这个信号会被ECU接收和解读,这个过程精准而快速,要节气门(throttle)依指令快速或缓和开启它应当张开的角度。随着定速巡航(Cruise Main)功能的引入,已经有大量应用。
(b)电子油门的主要功能。是将踩下油门踏板的角度转换成与其成正比的电压信号,同时把油门踏板的各种特殊位置制成接触开关,把怠速、高负荷、加减速等发动机工况变成电脉冲信号输送给电控发动机的控制器 ECU,以达到供油、喷油与变速等的优化自动控制。
(c)博世智能电子油门踏板产品
电子油门控制系统主要由油门踏板、踏板位移传感器、ECU(电控单元)、数据总线、伺服电动机和节气门执行机构组成。位移传感器安装在油门踏板内部,随时监测油门踏板的位置。(见图10)

当监测到油门踏板高度位置有变化,将此信息送往ECU,ECU对该信息和其它系统传来的数据信息进行运算处理,计算出一个控制信号,通过线路送到伺服电动机继电器,伺服电动机驱动节气门执行机构,数据总线则是负责系统ECU与其它ECU之间的通讯。
在自适应巡航中,则由ESP(ESC)中的ECU来控制电机,进而控制进气门开合幅度,最终控制车速。
四、线控总成的基本特点
(1)是一个电控单元为中心的控制系统,对外通过网络接口对外通讯;
(2)执行单元事由电机驱动的,配有电机控制器;
(3)信号发生器与信号接收器之间使用线缆连接的,信号传递不是无线信号。
五、研究总结
(a)线控总成是自动驾驶落脚点,目前人工驾驶阶段,这个技术还不成熟,关键是安全性;
(b)线控总成的难点是汽车电子器件质量高低,电子器件必须是车规的产品;
(c)发展自动驾驶汽车,发展好线控总成是基础;发展线控总成的基础是汽车电子。
汽车电子网为您提供最新汽车电子产品信息,及最具权威行业资讯和最新的行业动态,汽车电子行业最前沿的技术资讯,为全球汽车电子行业人士搭建交流平台。